In this lesson, you’ll learn how to define a home position for your robot. A home position is crucial because it prevents unnecessary sweeping motions when the robot moves to its first waypoint. By defining a home position near the working area, you ensure that the robot can smoothly transition to its task without any excess movement. The home position is saved as a joint position, meaning each axis is stored exactly, allowing the robot to return to this position with precision. After the video, a detailed description will follow.
Set the Home Position #
Open free ride mode in RoboDK and move the robot to a position near the working area that avoids any potential singularities or awkward angles.
Choose a position that allows the robot to reach the first waypoint without unnecessary sweeping movements.
Get the Robot’s Position #
Once the robot is in the desired home position, click Get Position in RoboDK.
This captures the current position of the robot.
Add a New Target #
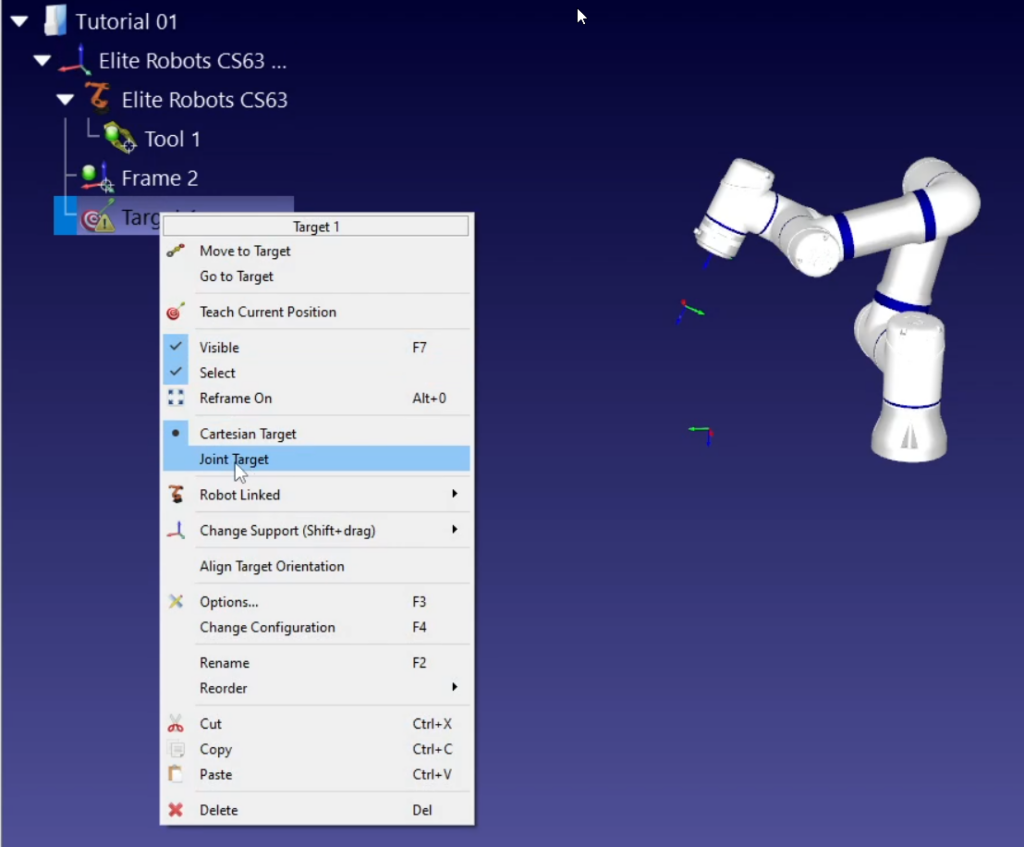
Right-click in the RoboDK tree and select Add Target.
It’s important to define the target as a Joint Target, which saves the exact rotation angles of each robot axis. This ensures the robot can return to the same configuration each time.
Set the Home Position #
Open free ride mode in RoboDK and move the robot to a position near the working area that avoids any potential singularities or awkward angles.
Choose a position that allows the robot to reach the first waypoint without unnecessary sweeping movements.
Rename the Target #
Rename the newly created target to something meaningful, such as “Home”.
No additional saving is required – simply hit Enter to confirm the name change.
Teach the Current Position #
Right-click the newly defined home position and select Teach Current Position.
This ensures that the robot’s exact joint angles at this point are saved as the home position.
Save the RoboDK station file.
Verify the Home Position #
Once the home position is set, the robot is ready to start from this point during any future operations.
By defining the home position, you ensure smooth transitions between the home position and the first waypoint, avoiding any sweeping motions.


